Overview
|
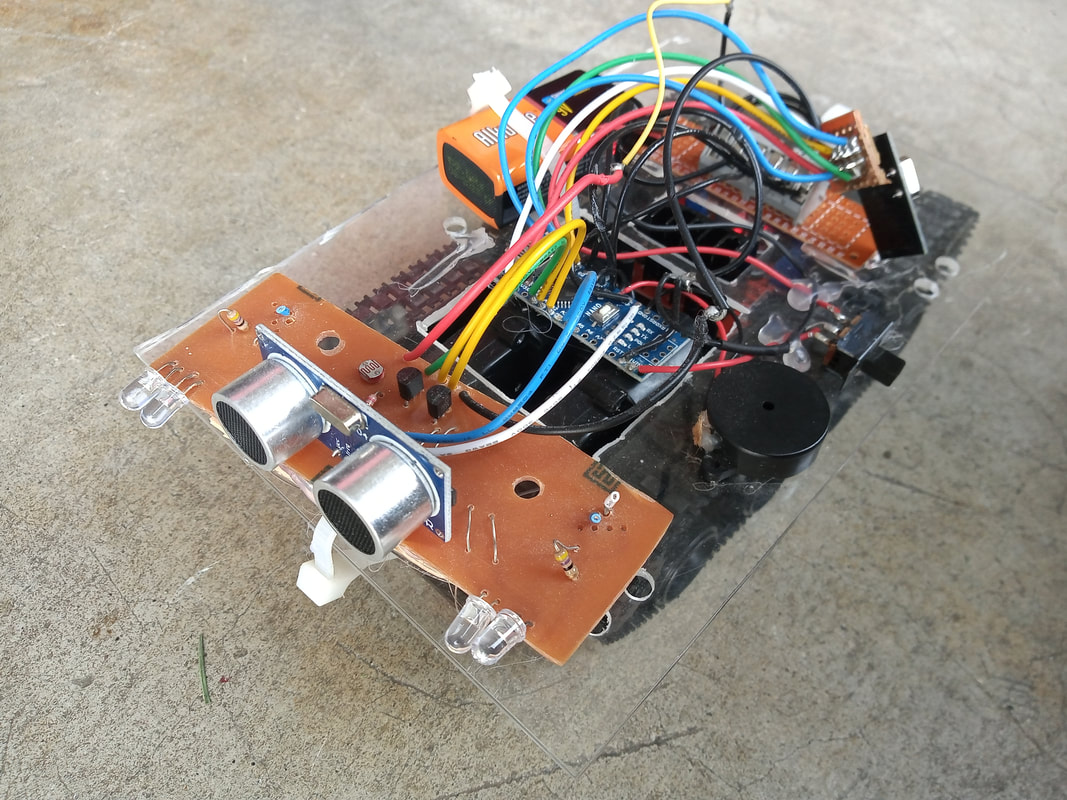
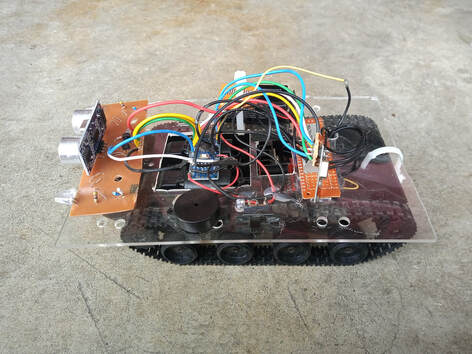
The small robot, is an Arduino-based remote controlled robot that I developed. This particular robot uses a tracked chassis and is built around the Arduino Nano.
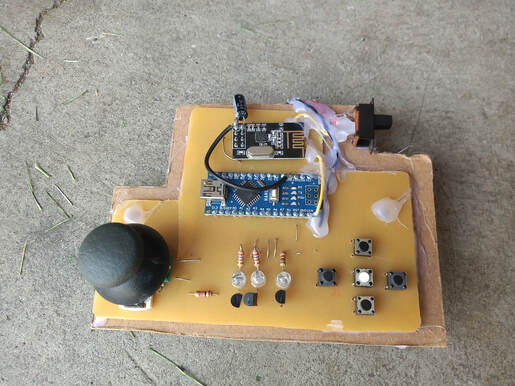
In addition to the robot, I designed and built a remote control. The remote for the robot uses an analog joystick and controls how fast or slow the robot moves. |
|
Theory of Operation
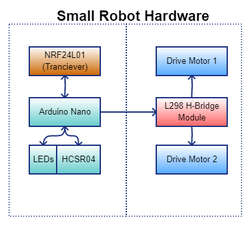
The small robot receives packets of data through the NRF24L01 RF transceiver. That data is then parsed by the Arduino and interpreted as commands. The Arduino then sends the correct signals to each component to instruct the motors to move, the light to turn on, etc.
The small robot uses a dual power system. A 9v battery powers the Arduino while 4AA batteries power the motors. This design allows the robot to be powered with standard batteries reliably.
The small robot uses a dual power system. A 9v battery powers the Arduino while 4AA batteries power the motors. This design allows the robot to be powered with standard batteries reliably.
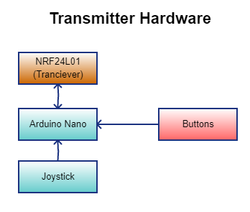
The transmitter sends out packets of data regularly. This data contains the state of all the buttons as well as the current position of the Joystick (0-255)
|
|
Code
If you want to use the small robot project to build your own robot checkout the GitHub repository.
